MI REPORTE DE FISICA ES DE LO QUE APRENDIMOS EN LA MATERIA ESTOS ULTIMOS PARCIALES FUE QUE
Física
La física constituye la rama de la física que elabora teorías y modelos usando el lenguaje matemático con el fin de explicar y comprender fenómenos físicos, aportando las herramientas necesarias no solo para el análisis sino para la predicción del comportamiento de los sistemas físicos. El objetivo de la física teórica es comprender el universo elaborando unos modelos matemáticos y conceptuales de la realidad que se utilizan para racionalizar, explicar y predecir los fenómenos de la naturaleza, planteando una teoría física de la realidad. Su núcleo central es la física matemática,nota 1 aunque también se usan otras técnicas conceptuales.
Aunque trabajos anteriores pueden considerarse parte de esta disciplina, la física teórica cobra especial fuerza desde la formulación de la mecánica analítica (Joseph-Louis de Lagrange, William Rowan Hamilton) y adquiere una relevancia de primera línea a partir de las revoluciones cuántica y relativista de principios del siglo XX (por ejemplo la bomba atómica fue una predicción de la física teórica).
Historia de la física
Desde hace mucho tiempo las personas han tratado de entender el porqué de la naturaleza y los fenómenos que en ella se observan: el paso de las estaciones, el movimiento de los cuerpos y de los astros, los fenómenos climáticos, las propiedades de los materiales, etc. Las primeras explicaciones aparecieron en la antigüedad y se basaban en consideraciones puramente filosóficas, sin verificarse experimentalmente. Algunas interpretaciones falsas, como la hecha por Ptolomeo en su famoso Almagesto - "La Tierra está en el centro del Universo y alrededor de ella giran los astros" - perduraron durante mucho tiempo.
Diferencias de la física elemental
En el siglo XVI Galileo fue pionero en el uso de experiencias para validar las teorías de la física. Se interesó en el movimiento de losastros y de los cuerpos. Usando instrumentos como el plano inclinado, descubrió la ley de la inercia de la dinámica, y con el uso de uno de los primeros telescopios observó que Júpiter tenía satélites girando a su alrededor y las manchas solares del Sol. Estas observaciones demostraban el modelo heliocéntrico de Nicolás Copérnico y el hecho de que los cuerpos celestes no son perfectos e inmutables. En la misma época, las observaciones de Tycho Brahe y los cálculos de Johannes Kepler permitieron establecer las leyes que gobiernan el movimiento de los planetas en el Sistema Solar.
En 1687 Newton publicó los Principios Matemáticos de la Naturaleza (Philosophiae Naturalis Principia Mathematica), una obra en la que se describen las leyes clásicas de la dinámica conocidas como: Leyes de Newton; y la ley de la gravitación universal de Newton. El primer grupo de leyes permitía explicar la dinámica de los cuerpos y hacer predicciones del movimiento y equilibrio de cuerpos, la segunda ley permitía demostrar las leyes de Kepler del movimiento de los planetas y explicar la gravedad terrestre (de aquí el nombre de gravedad universal). En esta época se puso de manifiesto uno de los principios básicos de la física, las leyes de la física son las mismas en cualquier punto del Universo. El desarrollo por Newton y Leibniz del cálculo matemático proporcionó las herramientas matemáticas para el desarrollo de la física como ciencia capaz de realizar predicciones. En esta época desarrollaron sus trabajos físicos como Robert Hooke y Christian Huygens estudiando las propiedades básicas de la materia y de la luz. Luego los científicos ingleses Willian Stiff y Charles Giffmehnt profundizaron el estudio de las causas de las leyes de Newton, es decir la gravedad.
Ley de Hooke la ley de elasticidad de Hooke o ley de Hooke, originalmente formulada para casos del estiramiento longitudinal, establece que el alargamiento unitario que experimenta un material elástico es directamente proporcional a la fuerza aplicada
 el alargamiento,
el alargamiento,  la longitud original,
la longitud original,  : módulo de Young,
: módulo de Young,  la sección transversal de la pieza estirada. La ley se aplica a materiales elásticos hasta un límite denominado límite elástico.
la sección transversal de la pieza estirada. La ley se aplica a materiales elásticos hasta un límite denominado límite elástico.
Esta ley recibe su nombre de Robert Hooke, físico británico contemporáneo de Isaac Newton. Ante el temor de que alguien se apoderara de su descubrimiento, Hooke lo publicó en forma de un famoso anagrama, ceiiinosssttuv, revelando su contenido un par de años más tarde. El anagrama significa Ut tensio sic vis ("como la extensión, así la fuerza").

 La ley de Hooke describe cuanto se alargará un resorte bajo una cierta fuerza.
La forma más común de representar matemáticamente la Ley de Hooke es mediante la ecuación del muelle o resorte, donde se relaciona la fuerza
La ley de Hooke describe cuanto se alargará un resorte bajo una cierta fuerza.
La forma más común de representar matemáticamente la Ley de Hooke es mediante la ecuación del muelle o resorte, donde se relaciona la fuerza  ejercida sobre el resorte con la elongación o alargamiento producido:
ejercida sobre el resorte con la elongación o alargamiento producido:
 se llama constante elástica del resorte y es su elongación o variación que experimenta su longitud.
se llama constante elástica del resorte y es su elongación o variación que experimenta su longitud.
La energía de deformación o energía potencial elástica asociada al estiramiento del resorte viene dada por la siguiente ecuación:
asociada al estiramiento del resorte viene dada por la siguiente ecuación:
La energía de deformación o energía potencial elástica asociada al estiramiento del resorte viene dada por la siguiente ecuación:
PROPIEDADES DE FLUIDOS
Se denomina fluido a un tipo de medio continuo formado por alguna sustancia entre cuyas moléculas hay una fuerza de atracción débil. Los fluidos se caracterizan por cambiar de forma sin que existan fuerzas restitutivas tendentes a recuperar la forma "original" (lo cual constituye la principal diferencia con un sólido deformable). Un fluido es un conjunto de partículas que se mantienen unidas entre si por fuerzas cohesivas débiles y/o las paredes de un recipiente; el término engloba a los líquidos y los gases. En el cambio de forma de un fluido la posición que toman sus moléculas varía, ante una fuerza aplicada sobre ellos, pues justamente fluyen. Los líquidos toman la forma del recipiente que los aloja, manteniendo su propio volumen, mientras que los gases carecen tanto de volumen como de forma propios. Las moléculas no cohesionadas se deslizan en los líquidos, y se mueven con libertad en los gases. Los fluidos están conformados por los líquidos y los gases, siendo los segundos mucho menos viscosos (casi fluidos ideales).
Ley de Hooke la ley de elasticidad de Hooke o ley de Hooke, originalmente formulada para casos del estiramiento longitudinal, establece que el alargamiento unitario que experimenta un material elástico es directamente proporcional a la fuerza aplicada :
siendo
 el alargamiento, la longitud original, : módulo de Young, la sección transversal de la pieza estirada. La ley se aplica a materiales elásticos hasta un límite denominado límite elástico.
el alargamiento, la longitud original, : módulo de Young, la sección transversal de la pieza estirada. La ley se aplica a materiales elásticos hasta un límite denominado límite elástico.Esta ley recibe su nombre de Robert Hooke, físico británico contemporáneo de Isaac Newton. Ante el temor de que alguien se apoderara de su descubrimiento, Hooke lo publicó en forma de un famoso anagrama, ceiiinosssttuv, revelando su contenido un par de años más tarde. El anagrama significa Ut tensio sic vis ("como la extensión, así la fuerza").
Ley de Hooke para los resortes
 ejercida sobre el resorte con la elongación o alargamiento producido:
ejercida sobre el resorte con la elongación o alargamiento producido:donde
 se llama constante elástica del resorte y es su elongación o variación que experimenta su longitud.
se llama constante elástica del resorte y es su elongación o variación que experimenta su longitud.La energía de deformación o energía potencial elástica
asociada al estiramiento del resorte viene dada por la siguiente ecuación:La energía de deformación o energía potencial elástica
asociada al estiramiento del resorte viene dada por la siguiente ecuación:Materiales isótropos
[editar] Materiales lineales
Para un material elástico lineal el módulo de elasticidad longitudinal es una constante (para valores de tensión dentro del rango de reversibilidad completa de deformaciones). En este caso, su valor se define como el cociente entre la tensión y la deformación que aparecen en una barra recta estirada fabricada con el material del que se quiere estimar el módulo de elasticidad:Donde:

 es el módulo de elasticidad longitudinal.
es el módulo de elasticidad longitudinal. es la presión ejercida sobre el área de sección transversal del objeto.
es la presión ejercida sobre el área de sección transversal del objeto. es la deformación unitaria en cualquier punto de la barra.
es la deformación unitaria en cualquier punto de la barra.
Por lo que dadas dos barras o prismas mecánicos geométricamente idénticos pero de materiales elásticos diferentes, al someter a ambas barras a deformaciones idénticas, se inducirán mayores tensiones cuanto mayor sea el módulo de elasticidad. De modo análogo, tenemos que sometidas a la misma fuerza, la ecuación anterior reescrita como:

nos indica que las deformaciones resultan menores para la barra con mayor módulo de elasticidad. En este caso, se dice que el material es más rígido.

PROPIEDADES DE FLUIDOS
Se denomina fluido a un tipo de medio continuo formado por alguna sustancia entre cuyas moléculas hay una fuerza de atracción débil. Los fluidos se caracterizan por cambiar de forma sin que existan fuerzas restitutivas tendentes a recuperar la forma "original" (lo cual constituye la principal diferencia con un sólido deformable). Un fluido es un conjunto de partículas que se mantienen unidas entre si por fuerzas cohesivas débiles y/o las paredes de un recipiente; el término engloba a los líquidos y los gases. En el cambio de forma de un fluido la posición que toman sus moléculas varía, ante una fuerza aplicada sobre ellos, pues justamente fluyen. Los líquidos toman la forma del recipiente que los aloja, manteniendo su propio volumen, mientras que los gases carecen tanto de volumen como de forma propios. Las moléculas no cohesionadas se deslizan en los líquidos, y se mueven con libertad en los gases. Los fluidos están conformados por los líquidos y los gases, siendo los segundos mucho menos viscosos (casi fluidos ideales).
Características
- La posición relativa de sus moléculas puede cambiar de forma abrupta.
- Todos los fluidos son compresibles en cierto grado. No obstante, los líquidos son fluidos igual que los gases.
- Tienen viscosidad, aunque la marviscosidad en los gases es mucho menor que en los líquidos.
- Compresible:Esta propiedad de los fluidos les permite mediante un agente externo al cambio de su velocidad y volumen, esta características son muy usadaspara la industria como palancas de presión.
Principio de Pascal
En física, el principio de Pascal o ley de Pascal, es una ley enunciada por el físico y matemático francés Blaise Pascal (1623–1662) que se resume en la frase: la presión ejercida por un fluido incompresible y en equilibrio dentro de un recipiente de paredes indeformables se transmite con igual intensidad en todas las direcciones y en todos los puntos del fluido.[1]El principio de Pascal puede comprobarse utilizando una esfera hueca, perforada en diferentes lugares y provista de un émbolo. Al llenar la esfera con agua y ejercer presión sobre ella mediante el émbolo, se observa que el agua sale por todos los agujeros con la misma velocidad y por lo tanto con la misma presión.
También podemos ver aplicaciones del principio de Pascal en las prensas hidráulicas, en los elevadores hidráulicos y en los frenos hidráulicos.
Principio de Bernoulli

- Cinética: es la energía debida a la velocidad que posea el fluido.
- Potencial gravitacional: es la energía debido a la altitud que un fluido posea.
- Energía de flujo: es la energía que un fluido contiene debido a la presión que posee.
Principio de Arquímedes
De Wikipedia, la enciclopedia libre

Donde E es el empuje , ρf es la densidad del fluido, V el «volumen de fluido desplazado» por algún cuerpo sumergido parcial o totalmente en el mismo, g la aceleración de la gravedad y m la masa, de este modo, el empuje depende de la densidad del fluido, del volumen del cuerpo y de la gravedad existente en ese lugar. El empuje (en condiciones normales[2] y descrito de modo simplificado[3] ) actúa verticalmente hacia arriba y está aplicado en el centro de gravedad del fluido desalojado por el cuerpo; este punto recibe el nombre de centro de carena.

Principio de Torricelli
Teorema de Torricelli 
El teorema de Torricelli es una aplicación del principio de Bernoulli y estudia el flujo de un líquido contenido en un recipiente, a través de un pequeño orificio, bajo la acción de la gravedad. A partir del teorema de Torricelli se puede calcular el caudal de salida de un líquido por un orificio. "La velocidad de un líquido en una vasija abierta, por un orificio, es la que tendría un cuerpo cualquiera, cayendo libremente en el vacío desde el nivel del líquido hasta el centro de gravedad del orificio":
Donde:

es la velocidad teórica del líquido a la salida del orificio
es la velocidad de aproximación.
es la distancia desde la superficie del líquido al centro del orificio.
es la aceleración de la gravedad
Para velocidades de aproximación bajas, la mayoría de los casos, la expresión anterior se transforma en:
Donde:

es la velocidad real media del líquido a la salida del orificio
es el coeficiente de velocidad. Para cálculos preliminares en aberturas de pared delgada puede admitirse 0.95 en el caso más desfavorable.
tomando =1
Experimentalmente se ha comprobado que la velocidad media de un chorro de un orificio de pared delgada, es un poco menor que la ideal, debido a la viscosidad del fluido y otros factores tales como la tensión superficial, de ahí el significado de este coeficiente de velocidad.
OBJETIVO:
Entender la importancia que aún tiene el sistema inglés en la vida diaria
El sistema inglés de unidades o sistema imperial, es aún usado ampliamente en los Estados Unidos de América y, cada vez en menor medida, en algunos países con tradición británica. Debido a la intensa relación comercial que tiene nuestro país con los EUA, existen aún en México muchos productos fabricados con especificaciones en este sistema. Ejemplos de ello son los productos de madera, tornillería, cables conductores y perfiles metálicos. Algunos instrumentos como los medidores de presión para neumáticos automotrices y otros tipos de manómetros frecuentemente emplean escalas en el sistema inglés.
El Sistema Inglés de unidades son las unidades no-métricas que se utilizan actualmente en los Estados Unidos y en muchos territorios de habla inglesa (como en el Reino Unido ), pero existen discrepancias entre los sistemas de Estados Unidos e Inglaterra. Este sistema se deriva de la evolución de las unidades locales a través de los siglos, y de los intentos de estandarización en Inglaterra . Las unidades mismas tienen sus orígenes en la antigua Roma. Hoy en día, estas unidades están siendo lentamente reemplazadas por el Sistema Internacional de Unidades , aunque en Estados Unidos la inercia del antiguo sistema y el alto costo de migración ha impedido en gran medida el cambio.
EQUIVALENCIAS DE LAS UNIDADES INGLESAS.
LONGITUD
1 milla = 1,609 m
1 yarda = 0.915 m
1 pie = 0.305 m
1 pulgada = 0.0254 m
MASA
1 libra = 0.454 Kg.
1 onza = 0.0283 Kg.
1 ton. inglesa = 907 Kg.
SUPERFICIE
1 pie 2 = 0.0929m^2
1 pulg 2 . = 0.000645m^2
1 yarda 2 = 0.836m^2
VOLUMEN Y CAPACIDAD
1 yarda 3 = 0.765 m^3
1 pie 3 = 0.0283 m^3
1 pulg 3 . = 0.0000164 m^3
1 galón = 3.785 l.
TAREA 2.
Elaborar una tabla con las unidades fundamentales del S.I. y sus equivalencias al Sistema Inglès.
Aceleración
En física, la aceleración es una magnitud vectorial que nos indica el cambio de velocidad por unidad de tiempo. En el contexto de la mecánica vectorial newtoniana se representa normalmente por  o
o  y su módulo por
y su módulo por  . Sus dimensiones son
. Sus dimensiones son ![\scriptstyle [ L \cdot T^{-2} ]](http://upload.wikimedia.org/wikipedia/es/math/8/d/9/8d93fafc52fa31cdcc17a888d15c7165.png) . Su unidad en el Sistema Internacional es el m/s2.
. Su unidad en el Sistema Internacional es el m/s2.
En la mecánica newtoniana, para un cuerpo con masa constante, la aceleración del cuerpo es proporcional a la fuerza que actúa sobre él (segunda ley de Newton):
Aceleración media e instantánea

Definición de la aceleración de una partícula en un movimiento cualquiera. Obsérvese que la aceleración no es tangente a la trayectoria.
Cada instante, o sea en cada punto de la trayectoria, queda definido un vector velocidad que, en general, cambia tanto en módulo como en dirección al pasar de un punto a otro de la trayectoria. La dirección de la velocidad cambiará debido a que la velocidad es tangente a la trayectoria y ésta, por lo general, no es rectilínea. En la Figura se representan los vectores velocidad correspondientes a los instantes t y t+Δt, cuando la partícula pasa por los puntos P y Q, respectivamente. El cambio vectorial en la velocidad de la partícula durante ese intervalo de tiempo está indicado por Δv, en el triángulo vectorial al pie de la figura. Se define la aceleración media de la partícula, en el intervalo de tiempo Δt, como el cociente:
o y su módulo por . Sus dimensiones son . Su unidad en el Sistema Internacional es el m/s2.En la mecánica newtoniana, para un cuerpo con masa constante, la aceleración del cuerpo es proporcional a la fuerza que actúa sobre él (segunda ley de Newton):
donde F es la fuerza resultante que actúa sobre el cuerpo, m es la masa del cuerpo, y a es la aceleración. La relación anterior es válida en cualquier sistema de referencia inercial.

Aceleración media e instantánea

Que es un vector paralelo a Δv y dependerá de la duración del intervalo de tiempo Δt considerado. La aceleración instantánea se la define como el límite al que tiende el cociente incremental Δv/Δt cuando Δt→0; esto es la derivada del vector velocidad con respecto al tiempo:

Puesto que la velocidad instantánea v a su vez es la derivada del vector posición r respecto al tiempo, la aceleración es la derivada segunda de la posición con respecto del tiempo:
De igual forma se puede definir la velocidad instantánea a partir de la aceleración como:

Se puede obtener la velocidad a partir de la aceleración mediante integración:
[editar] Medición de la aceleración
La medida de la aceleración puede hacerse con un sistema de adquisición de datos y un simple acelerómetro. Los acelerómetros electrónicos son fabricados para medir la aceleración en una, dos o tres direcciones. Cuentan con dos elementos conductivos, separados por un material que varia su conductividad en función de las medidas, que a su vez serán relativas a la aceleración del conjunto.[editar] Unidades
Las unidades de la aceleración son:- 1 m/s2
- 1 cm/s2 = 1 Gal
- Componentes intrínsecas de la aceleración: aceleraciones tangencial y normal
En tanto que el vector velocidad v es tangente a la trayectoria, el vector aceleración a puede descomponerse en dos componentes (llamadas componentes intrínsecas) mutuamente perpendiculares: una componente tangencial at (en la dirección de la tangente a la trayectoria), llamada aceleración tangencial, y una componente normal an (en la dirección de la normal principal a la trayectoria), llamada aceleración normal o centrípeta (este último nombre en razón a que siempre está dirigida hacia el centro de curvatura).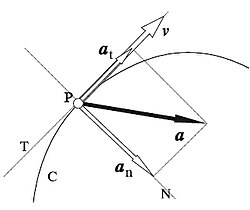
Componentes intrínsecas de la aceleración.
Derivando la velocidad con respecto al tiempo, teniendo en cuenta que el vector tangente cambia de dirección al pasar de un punto a otro de la trayectoria (esto es, no es constante) obtenemos
siendo
 el vector unitario tangente a la trayectoria en la misma dirección que la velocidad y
el vector unitario tangente a la trayectoria en la misma dirección que la velocidad y  la velocidad angular. Resulta conveniente escribir la expresión anterior en la forma
la velocidad angular. Resulta conveniente escribir la expresión anterior en la forma
siendo
 el vector unitario normal a la trayectoria, esto es dirigido hacia el centro de curvatura de la misma,
el vector unitario normal a la trayectoria, esto es dirigido hacia el centro de curvatura de la misma, el radio de curvatura de la trayectoria, esto es el radio de la circunferencia osculatriz a la trayectoria.
el radio de curvatura de la trayectoria, esto es el radio de la circunferencia osculatriz a la trayectoria.
Cada una de estas dos componentes de la aceleración tiene un significado físico bien definido. Cuando una partícula se mueve, su velocidad puede cambiar y este cambio lo mide la aceleración tangencial. Pero si la trayectoria es curva también cambia la dirección de la velocidad y este cambio lo mide la aceleración normal.
- Si en el movimiento curvilíneo la velocidad es constante (v=cte), la aceleración tangencial será nula, pero habrá una cierta aceleración normal, de modo que en un movimiento curvilíneo siempre habrá aceleración.
- Si el movimiento es circular, entonces el radio de curvatura es el radio R de la circunferencia y la aceleración normal se escribe como an = v2/R.
- Si la trayectoria es rectilínea, entonces el radio de curvatura es infinito (ρ→∞) de modo que an=0 (no hay cambio en la dirección de la velocidad) y la aceleración tangencial at será nula o no según que la velocidad sea o no constante.
- es el vector unitario tangente a la curva.
- es el vector unitario normal a la curva.
- es el vector velocidad angular que es paralelo al vector binormal a la curva.
Desplazamiento
Desplazamiento, en física es la longitud de la trayectoria comprendida entre la posición inicial y la posición final de un punto material. Un caso particular de desplazamiento es el debido a la difusión.Desplazamiento (vector)
En mecánica, el desplazamiento es el vector que define la posición de un punto o partícula en relación a un origen A con respecto a una posición B. El vector se extiende desde el punto de referencia hasta la posición final. Cuando se habla del desplazamiento de un cuerpo en el espacio solo importa la posición inicial del cuerpo y la posición final, ya que la trayectoria que describe el cuerpo no es de importancia si se quiere hallar su desplazamiento. Esto puede observarse cuando un jugador de fútbol parte de un punto de la cancha y le da una vuelta entera para terminar en la misma posición inicial; para la física allí no hay desplazamiento por que su posición inicial es igual a la final.
Vector desplazamiento y distancia recorrida a lo largo de un camino.- Distancia
La distancia se refiere a cuanto espacio recorre un objeto durante su movimiento. Es la cantidad movida. También se dice que es la suma de las distancias recorridas. Por ser una medida de longitud, la distancia se expresa en unidades de metro según el Sistema Internacional de Medidas. Al expresar la distancia, por ser una cantidad escalar, basta con mencionar la magnitud y la unidad. Imagina que comienzas a caminar siguiendo la trayectoria: ocho metros al norte, doce metros al este y finalmente ocho metros al sur. Luego del recorrido, la distancia total recorrida será de 28 metros. El número 28 representa la magnitud de la distancia recorrida.

La figura muestra que podemos iniciar un evento y seguir una ruta. Esta ruta es la que hace que recorramos una distancia Acción a distancia
La acción a distancia es una característica de las descripciones prerrelativistas de los campos de fuerzas de partículas que interactúan entre sí. Esta propiedad implica que para cada instante de tiempo las fuerzas sobre una partícula concreta debida a otras partículas depende de las posiciones de esas otras partículas en el mismo instante, como si la fuerza "se transmitiera instantáneamente" o existiera una "acción a distancia" por parte de las otras partículas.[1]
Representación artística de la explosión de la supernova SN 2006gy, situada a 238 millones de años luz. De ser válido el principio de acción a distancia, las perturbaciones de origen gravitatorio de este estallido nos afectarían inmediatamente, más tarde nos llegarían las de origen electromagnético, que se transmiten a la velocidad de la luz.
- Acción a distancia y relatividad del tiempo
Actualmente se conoce que las teorías que tienen la propiedad de acción a distancia, no son una descripción adecuada de la realidad y como mucho sólo una aproximación conveniente en el caso de partículas que se mueven con velocidades mucho menores que la velocidad de la luz. Esto se debe al carácter relativo del tiempo. Más explícitamente, el carácter probadamente relativo del tiempo medido por diferentes observadores en diferentes estados de movimiento, implica que no puede existir una asignación objetiva del instante de tiempo a todos los eventos, que sea válida para todos los observadores a la vez. Esa dificultad implica que no es posible expresar la fuerza en términos sólo de las posiciones de las partículas en un instante, porque esas posiciones y el propio instante son relativos a cada observador. Si tiene que existir una descripción válida para todos los observadores y por tanto covariante entonces esta descripción no puede basarse sólo en la posición en cada instante de las partículas, y por tanto, no puede ser válida una teoría con acción a distancia. Ionización
La ionización es el fenómeno químico o físico mediante el cual se producen iones, estos son átomos o moléculas cargadas eléctricamente debido al exceso o falta de electrones respecto a un átomo o molécula neutro. A la especie química con más electrones que el átomo o molécula neutros se le llama anión, y posee una carga neta negativa, y a la que tiene menos electrones catión, teniendo una carga neta positiva. Hay varias maneras por las que se pueden formar iones de átomos o moléculas.- Aplicación: esterilización por ionización
En el ambiente (aire, agua, suelo, etc.) existen microorganismos o microbios que contaminan, aprovechando los nutrientes a su alcance para desarrollarse o permanecer en ellos. - Cuantificación
La energía radiante es una cantidad objetiva que depende sólo de la intensidad de luz y del color de la luz. La intensidad de hecho está relacionada con el número de fotones por unidad de tiempo que inciden en una superficie y el color está relacionado con la longitud de onda o frecuencia de la luz indicente. De hecho la potencia lumínica asociada a una fuente es la tasa de transferencia de energía en forma de luz por unidad de tiempo y puede expresarse como:

Movimiento rectilíneo uniforme
Un movimiento es rectilíneo cuando el cuerpo describe una trayectoria recta, y es uniforme cuando su velocidad es constante en el tiempo, dado que su aceleración es nula. Nos referimos a él mediante el acrónimo MRU.
Movimiento rectilíneo uniforme. Representación gráfica de la posición, velocidad y aceleración de un móvil en función del tiempo.
El MRU (movimiento rectilíneo uniforme) se caracteriza por:
- Movimiento que se realiza sobre una línea recta.
- Velocidad constante; implica magnitud y dirección constantes.
- La magnitud de la velocidad recibe el nombre de celeridad o rapidez.
Movimiento rectilíneo uniforme
 Movimiento rectilíneo uniforme. Representación gráfica de la posición, velocidad y aceleración de un móvil en función del tiempo.Un movimiento es rectilíneo cuando el cuerpo describe una trayectoria recta, y es uniforme cuando su velocidad es constante en el tiempo, dado que su aceleración es nula. Nos referimos a él mediante el acrónimo MRU.El MRU (movimiento rectilíneo uniforme) se caracteriza por:· Movimiento que se realiza sobre una línea recta.· Velocidad constante; implica magnitud y dirección constantes.· La magnitud de la velocidad recibe el nombre de celeridad o rapidez· Vector de posición de un punto en el plano de coordenadas
Movimiento rectilíneo uniforme. Representación gráfica de la posición, velocidad y aceleración de un móvil en función del tiempo.Un movimiento es rectilíneo cuando el cuerpo describe una trayectoria recta, y es uniforme cuando su velocidad es constante en el tiempo, dado que su aceleración es nula. Nos referimos a él mediante el acrónimo MRU.El MRU (movimiento rectilíneo uniforme) se caracteriza por:· Movimiento que se realiza sobre una línea recta.· Velocidad constante; implica magnitud y dirección constantes.· La magnitud de la velocidad recibe el nombre de celeridad o rapidez· Vector de posición de un punto en el plano de coordenadas El vector
El vector que une el origen de coordenadas O con un punto P se llama vector de
posición del punto
P.Coordenadas o componentes de un vector en el plano
que une el origen de coordenadas O con un punto P se llama vector de
posición del punto
P.Coordenadas o componentes de un vector en el plano Si las coordenadas de A y B son:
Si las coordenadas de A y B son:
 Las coordenadas o componentes del vector
Las coordenadas o componentes del vector son las coordenadas
del extremo menos las coordenadas del origen.
son las coordenadas
del extremo menos las coordenadas del origen. EjemplosHallar las componentes de un vector cuyos extremos son:
EjemplosHallar las componentes de un vector cuyos extremos son: Un vectortiene de componentes (5, −2). Hallar las coordenadas de A si se conoce el extremo B(12,
−3).
Un vectortiene de componentes (5, −2). Hallar las coordenadas de A si se conoce el extremo B(12,
−3). · Magnitud físicaUna magnitud física es una propiedad o cualidad medible de un sistema físico, es decir, a la que se le pueden asignar distintos valores como resultado de una medición. Las magnitudes físicas se miden usando un patrón que tenga bien definida esa magnitud, y tomando como unidad la cantidad de esa propiedad que posea el objeto patrón. Por ejemplo, se considera que el patrón principal de longitud es el metro en el Sistema Internacional de Unidades.Las primeras magnitudes definidas estaban relacionadas con la medición de longitudes, áreas, volúmenes, masas patrón, y la duración de periodos de tiempo.Existen magnitudes básicas y derivadas, y constituyen ejemplos de magnitudes físicas: la masa, la longitud, el tiempo, la carga eléctrica, la densidad, la temperatura, la velocidad, la aceleración, y la energía. En términos generales, es toda propiedad de los cuerpos que puede ser medida. De lo dicho se desprende la importancia fundamental del instrumento de medición en la definición de la magnitud.[1]La Oficina Internacional de Pesos y Medidas, por medio del Vocabulario Internacional de Metrología (International Vocabulary of Metrology, VIM), define a la magnitud como un atributo de un fenómeno; un cuerpo o sustancia que puede ser distinguido cualitativamente y determinado cuantitativamente.[2]A diferencia de las unidades empleadas para expresar su valor, las magnitudes físicas se expresan en cursiva: así, por ejemplo, la "masa" se indica con "m", y "una masa de 3 kilogramos" la expresaremos como m = 3 kg.·· Tipos Magnitudes físicasLas magnitudes físicas pueden ser clasificadas de acuerdo a varios criterios:· Según su expresión matemática, las magnitudes se clasifican en escalares, vectoriales y tensoriales.· Según su actividad, se clasifican en magnitudes extensivas e intensivas.·· Magnitudes fundamentalsLas magnitudes fundamentales son aquellas magnitudes físicas que, gracias a su combinación, dan origen a las magnitudes derivadas. Tres de las magnitudes fundamentales más importantes son la masa, la longitud y el tiempo, pero en ocasiones en física también nos pone como agregadas a la temperatura, la intensidad luminosa, la cantidad de sustancia y la intensidad de corrienteUnidades en el Sistema Internacional de Unidades (SI)TIPOS DE ONDAS• Ondas mecánicas: las ondas mecánicas necesitan un medio elástico (sólido, líquido o gaseoso) para propagarse. Las partículas del medio oscilan alrededor de un punto fijo, por lo que no existe transporte neto de materia a través del medio. Como en el caso de una alfombra o un látigo cuyo extremo se sacude, la alfombra no se desplaza, sin embargo una onda se propaga a través de ella. Dentro de las ondas mecánicas tenemos las ondas elásticas, las ondas sonoras y las ondas de gravedad.• Ondas electromagnéticas: las ondas electromagnéticas se propagan por el espacio sin necesidad de un medio pudiendo, por tanto, propagarse en el vacío. Esto es debido a que las ondas electromagnéticas son producidas por las oscilaciones de un campo eléctrico en relación con un campo magnético asociado.• Ondas gravitacionales: las ondas gravitacionales son perturbaciones que alteran la geometría misma del espacio-tiempo y aunque es común representarlas viajando en el vacío, técnicamente no podemos afirmar que se desplacen por ningún espacio sino que en sí mismas son alteraciones del espacio-tiempo.• ondas unidimensionales: las ondas unidimensionales son aquellas que se propagan a lo largo de una sola dirección del espacio, como las ondas en los muelles o en las cuerdas. Si la onda se propaga en una dirección única, sus frentes de onda son planos y paralelos.• Ondas bidimensionales o superficiales: son ondas que se propagan en dos direcciones. Pueden propagarse, en cualquiera de las direcciones de una superficie, por ello, se denominan también ondas superficiales. Un ejemplo son las ondas que se producen en la superficie de un lago cuando se deja caer una piedra sobre él.• Ondas tridimensionales o esféricas: son ondas que se propagan en tres direcciones. Las ondas tridimensionales se conocen también como ondas esféricas, porque sus frentes de ondas son esferas concéntricas que salen de la fuente de perturbación expandiéndose en todas direcciones. El sonido es una onda tridimensional. Son ondas tridimensionales las ondas sonoras (mecánicas) y las ondas electromagnéticas.• ondas longitudinales: el movimiento de las partículas que transportan la onda es paralelo a la dirección de propagación de la onda. Por ejemplo, un muelle que se comprime da lugar a una onda longitudinal.• ondas transversales: las partículas se mueven perpendicularmente a la dirección de propagación de la onda.• Ondas periódicas: la perturbación local que las origina se produce en ciclos repetitivos por ejemplo una onda senoidal.Método científicoEl método científico; camino hacia el conocimiento) es un método de investigación Presenta diversas definiciones debido a la complejidad de una exactitud en su conceptualización: "Conjunto de pasos fijados de antemano por una disciplina con el fin de alcanzar conocimientos válidos mediante instrumentos confiables, secuencia estándar para formular y responder a una pregunta, pauta que permite a los investigadores ir desde el punto A hasta el punto Z con la confianza de obtener un conocimiento válido".[cita requerida]El método científico está sustentado por dos pilares fundamentales. El primero de ellos es la reproducibilidad, es decir, la capacidad de repetir un determinado experimento, en cualquier lugar y por cualquier persona. Este pilar se basa, esencialmente, en la comunicación y publicidad de los resultados obtenidos. El segundo pilar es la refutabilidad. Es decir, que toda proposición científica tiene que ser susceptible de ser falsada o refutada (falsacionismo). Esto implica que se podrían diseñar experimentos, que en el caso de dar resultados distintos a los predichos, negarían la hipótesis puesta a prueba. La falsabilidad no es otra cosa que el modus tollendo tollens del método hipotético deductivo experimental. Según James B. Conant, no existe un método científico. El científico usa métodos definitorios, métodos clasificatorios, métodos estadísticos, métodos hipotético-deductivos, procedimientos de medición, etcétera. Y según esto, referirse a el método científico es referirse a este conjunto de tácticas empleadas para constituir el conocimiento, sujetas al devenir histórico, y que eventualmente podrían ser otras en el futuro.[1] Ello nos conduce tratar de sistematizar las distintas ramas dentro del campo del método científico
· Magnitud físicaUna magnitud física es una propiedad o cualidad medible de un sistema físico, es decir, a la que se le pueden asignar distintos valores como resultado de una medición. Las magnitudes físicas se miden usando un patrón que tenga bien definida esa magnitud, y tomando como unidad la cantidad de esa propiedad que posea el objeto patrón. Por ejemplo, se considera que el patrón principal de longitud es el metro en el Sistema Internacional de Unidades.Las primeras magnitudes definidas estaban relacionadas con la medición de longitudes, áreas, volúmenes, masas patrón, y la duración de periodos de tiempo.Existen magnitudes básicas y derivadas, y constituyen ejemplos de magnitudes físicas: la masa, la longitud, el tiempo, la carga eléctrica, la densidad, la temperatura, la velocidad, la aceleración, y la energía. En términos generales, es toda propiedad de los cuerpos que puede ser medida. De lo dicho se desprende la importancia fundamental del instrumento de medición en la definición de la magnitud.[1]La Oficina Internacional de Pesos y Medidas, por medio del Vocabulario Internacional de Metrología (International Vocabulary of Metrology, VIM), define a la magnitud como un atributo de un fenómeno; un cuerpo o sustancia que puede ser distinguido cualitativamente y determinado cuantitativamente.[2]A diferencia de las unidades empleadas para expresar su valor, las magnitudes físicas se expresan en cursiva: así, por ejemplo, la "masa" se indica con "m", y "una masa de 3 kilogramos" la expresaremos como m = 3 kg.·· Tipos Magnitudes físicasLas magnitudes físicas pueden ser clasificadas de acuerdo a varios criterios:· Según su expresión matemática, las magnitudes se clasifican en escalares, vectoriales y tensoriales.· Según su actividad, se clasifican en magnitudes extensivas e intensivas.·· Magnitudes fundamentalsLas magnitudes fundamentales son aquellas magnitudes físicas que, gracias a su combinación, dan origen a las magnitudes derivadas. Tres de las magnitudes fundamentales más importantes son la masa, la longitud y el tiempo, pero en ocasiones en física también nos pone como agregadas a la temperatura, la intensidad luminosa, la cantidad de sustancia y la intensidad de corrienteUnidades en el Sistema Internacional de Unidades (SI)TIPOS DE ONDAS• Ondas mecánicas: las ondas mecánicas necesitan un medio elástico (sólido, líquido o gaseoso) para propagarse. Las partículas del medio oscilan alrededor de un punto fijo, por lo que no existe transporte neto de materia a través del medio. Como en el caso de una alfombra o un látigo cuyo extremo se sacude, la alfombra no se desplaza, sin embargo una onda se propaga a través de ella. Dentro de las ondas mecánicas tenemos las ondas elásticas, las ondas sonoras y las ondas de gravedad.• Ondas electromagnéticas: las ondas electromagnéticas se propagan por el espacio sin necesidad de un medio pudiendo, por tanto, propagarse en el vacío. Esto es debido a que las ondas electromagnéticas son producidas por las oscilaciones de un campo eléctrico en relación con un campo magnético asociado.• Ondas gravitacionales: las ondas gravitacionales son perturbaciones que alteran la geometría misma del espacio-tiempo y aunque es común representarlas viajando en el vacío, técnicamente no podemos afirmar que se desplacen por ningún espacio sino que en sí mismas son alteraciones del espacio-tiempo.• ondas unidimensionales: las ondas unidimensionales son aquellas que se propagan a lo largo de una sola dirección del espacio, como las ondas en los muelles o en las cuerdas. Si la onda se propaga en una dirección única, sus frentes de onda son planos y paralelos.• Ondas bidimensionales o superficiales: son ondas que se propagan en dos direcciones. Pueden propagarse, en cualquiera de las direcciones de una superficie, por ello, se denominan también ondas superficiales. Un ejemplo son las ondas que se producen en la superficie de un lago cuando se deja caer una piedra sobre él.• Ondas tridimensionales o esféricas: son ondas que se propagan en tres direcciones. Las ondas tridimensionales se conocen también como ondas esféricas, porque sus frentes de ondas son esferas concéntricas que salen de la fuente de perturbación expandiéndose en todas direcciones. El sonido es una onda tridimensional. Son ondas tridimensionales las ondas sonoras (mecánicas) y las ondas electromagnéticas.• ondas longitudinales: el movimiento de las partículas que transportan la onda es paralelo a la dirección de propagación de la onda. Por ejemplo, un muelle que se comprime da lugar a una onda longitudinal.• ondas transversales: las partículas se mueven perpendicularmente a la dirección de propagación de la onda.• Ondas periódicas: la perturbación local que las origina se produce en ciclos repetitivos por ejemplo una onda senoidal.Método científicoEl método científico; camino hacia el conocimiento) es un método de investigación Presenta diversas definiciones debido a la complejidad de una exactitud en su conceptualización: "Conjunto de pasos fijados de antemano por una disciplina con el fin de alcanzar conocimientos válidos mediante instrumentos confiables, secuencia estándar para formular y responder a una pregunta, pauta que permite a los investigadores ir desde el punto A hasta el punto Z con la confianza de obtener un conocimiento válido".[cita requerida]El método científico está sustentado por dos pilares fundamentales. El primero de ellos es la reproducibilidad, es decir, la capacidad de repetir un determinado experimento, en cualquier lugar y por cualquier persona. Este pilar se basa, esencialmente, en la comunicación y publicidad de los resultados obtenidos. El segundo pilar es la refutabilidad. Es decir, que toda proposición científica tiene que ser susceptible de ser falsada o refutada (falsacionismo). Esto implica que se podrían diseñar experimentos, que en el caso de dar resultados distintos a los predichos, negarían la hipótesis puesta a prueba. La falsabilidad no es otra cosa que el modus tollendo tollens del método hipotético deductivo experimental. Según James B. Conant, no existe un método científico. El científico usa métodos definitorios, métodos clasificatorios, métodos estadísticos, métodos hipotético-deductivos, procedimientos de medición, etcétera. Y según esto, referirse a el método científico es referirse a este conjunto de tácticas empleadas para constituir el conocimiento, sujetas al devenir histórico, y que eventualmente podrían ser otras en el futuro.[1] Ello nos conduce tratar de sistematizar las distintas ramas dentro del campo del método científico





